Traveler...

Bridging low-level hardware constraints and high-level software abstraction. Building everything from Verilog FSMs on an FPGA to offline AI assistants and remote health monitoring tools.
Whether writing ARM assembly for microcontroller peripherals, designing a multifunction calculator on a Basys 3 FPGA, or developing FastAPI backends for local AI models, I focus on understanding systems from the ground up.
Knowing the hardware closely makes software tradeoffs easier to reason about: latency, memory, interfaces, and where an abstraction starts to leak.
NUS Year 2 · CEG · AI Minor · Teaching Assistant (CS2113)

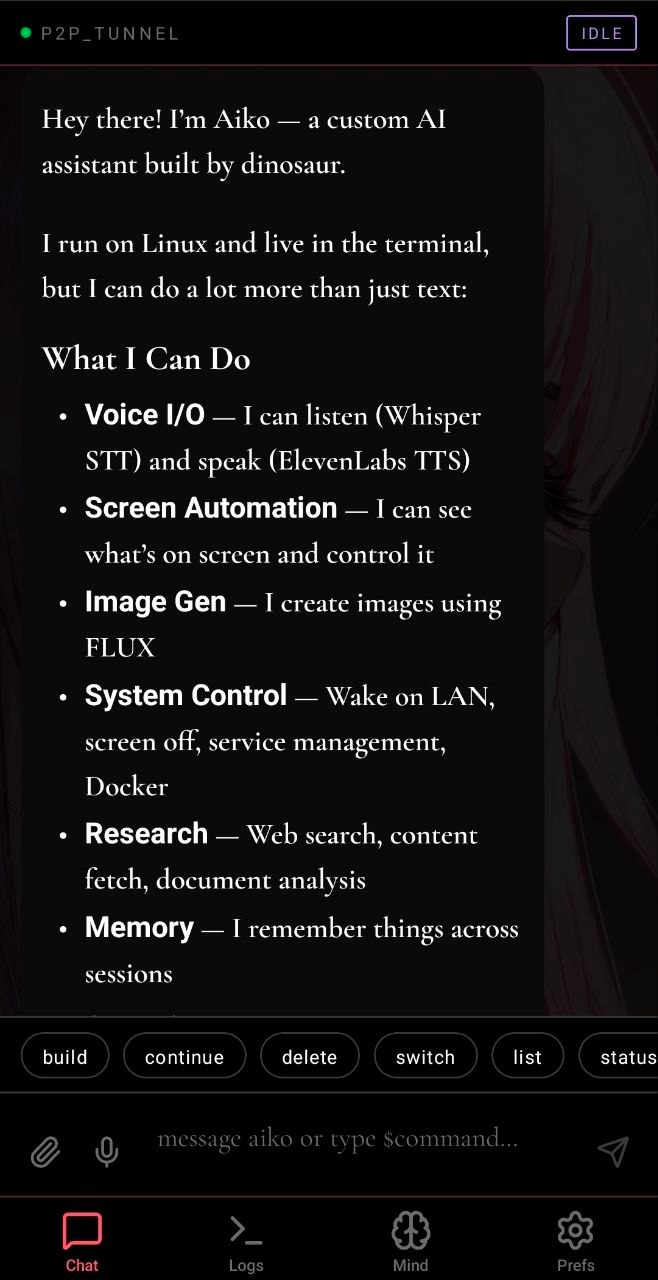
My personal OS agent: a local daemon, mobile app, Telegram bridge, memory system, and tool runtime wired into one loop. It gives me one interface for files, shell, Git, Docker, calendar, web, voice, image generation, and long-running build work. Under the hood: local Ollama by default, OpenRouter when I want speed, plus a 3-lane Gemini CLI software factory. Its mothership layer turns old repos, scripts, and hackathon builds into manifest-backed skills Aiko can call directly.

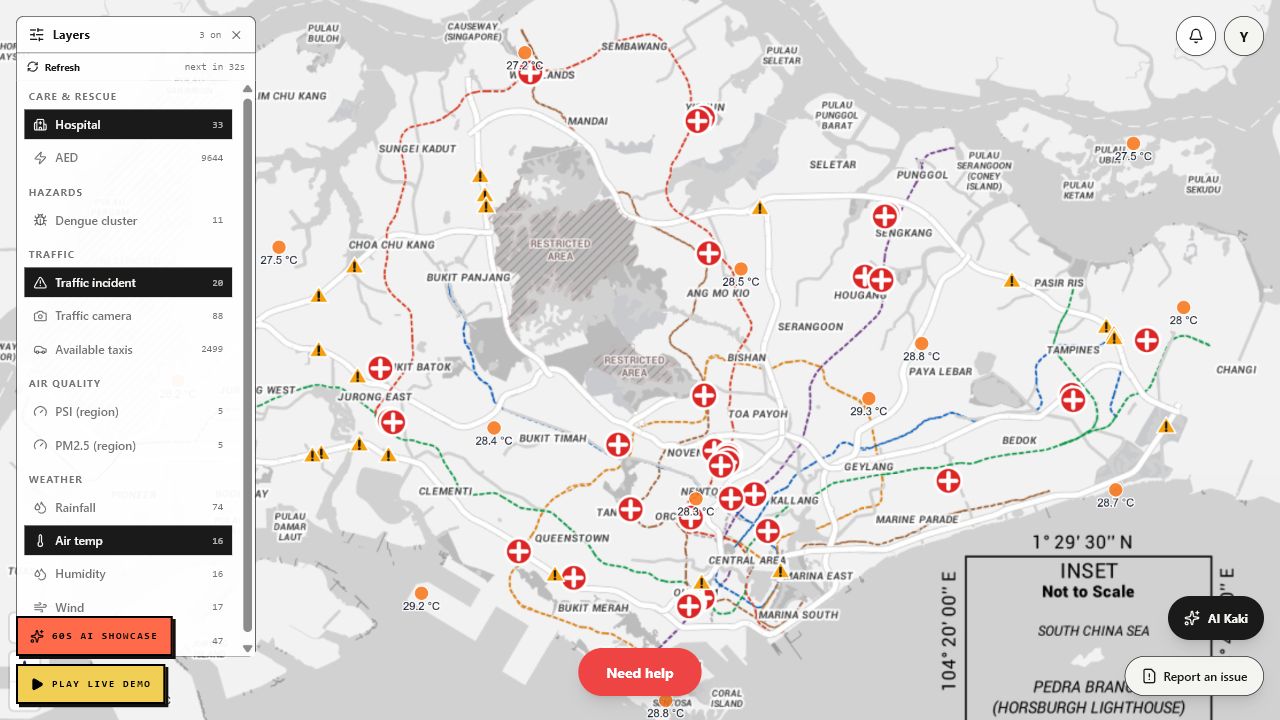
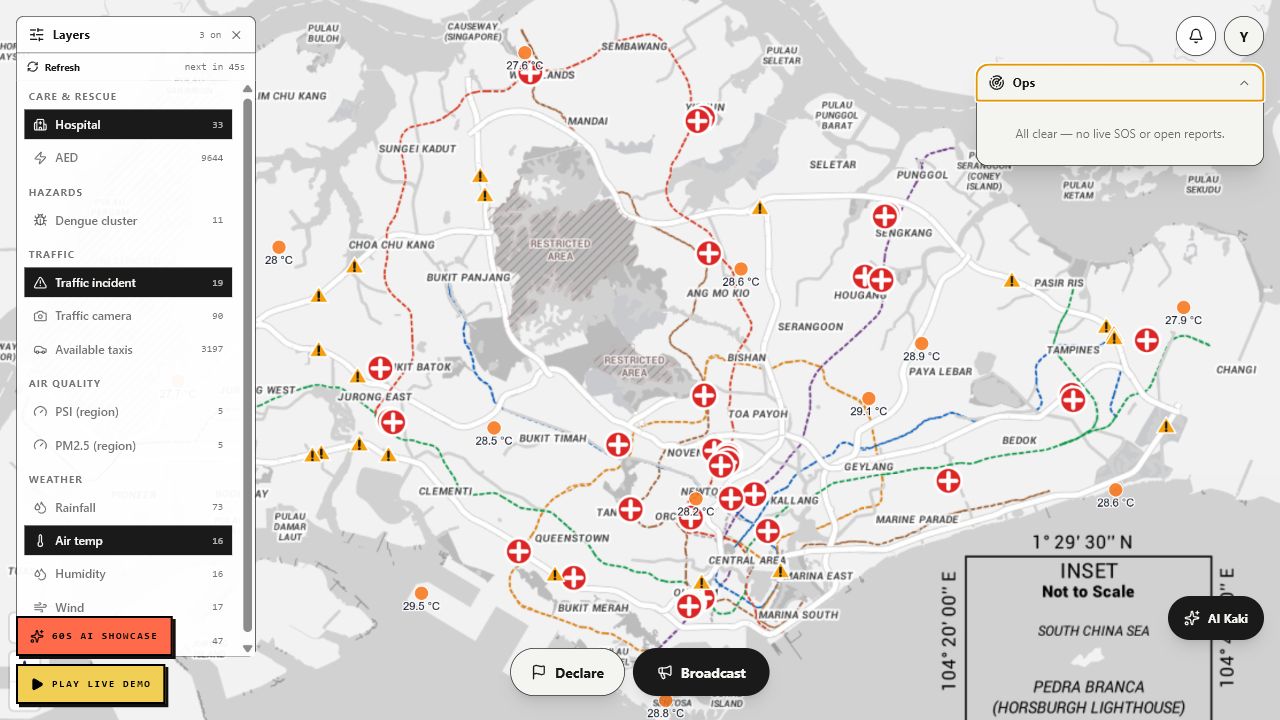
A live, role-aware map of Singapore that gives citizens, responders, and operations teams one shared emergency picture. SOS signals, reports, live public data, dispatch, and grounded AI guidance all flow through a canonical MQTT and Redis state layer.
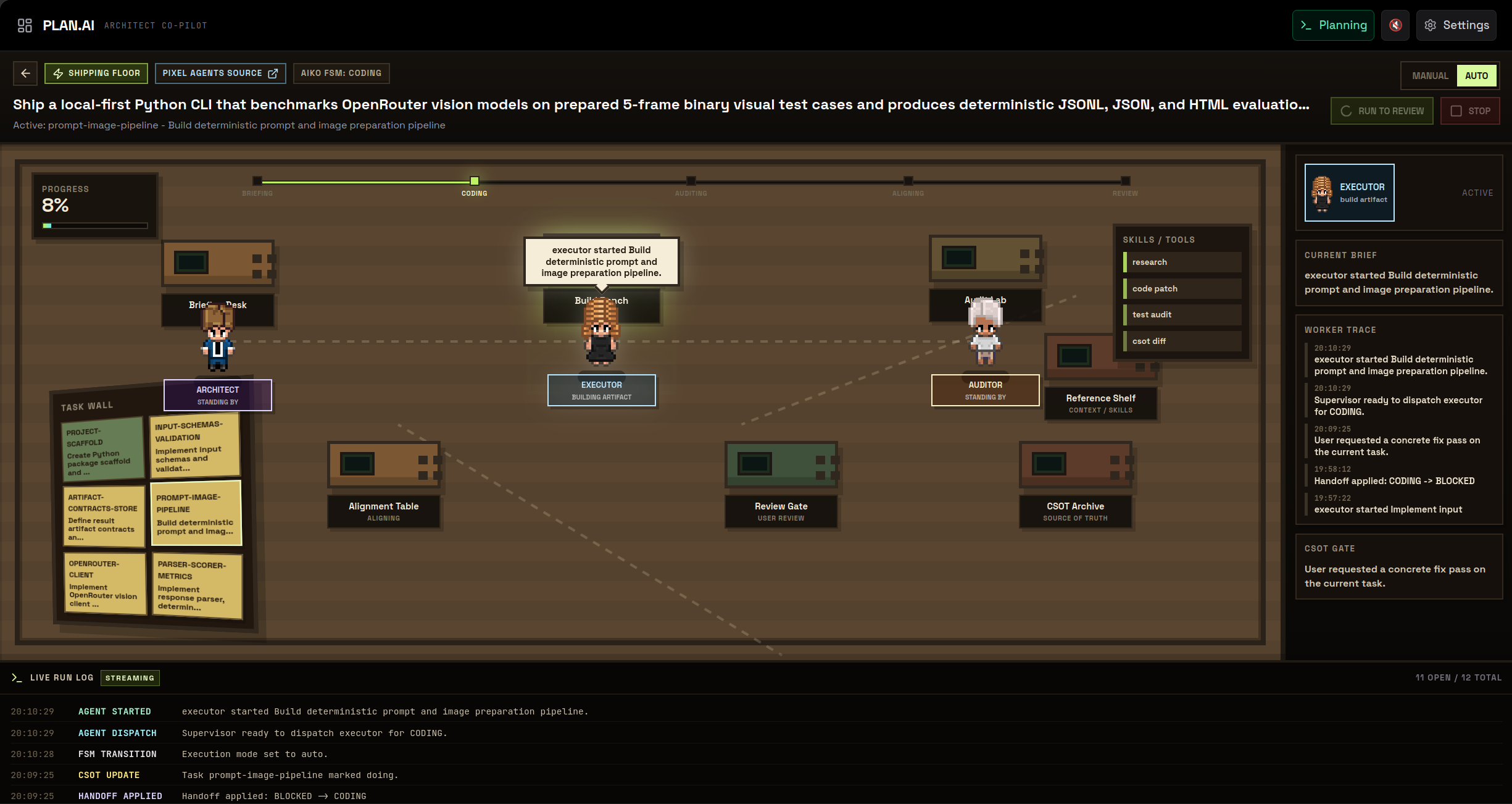
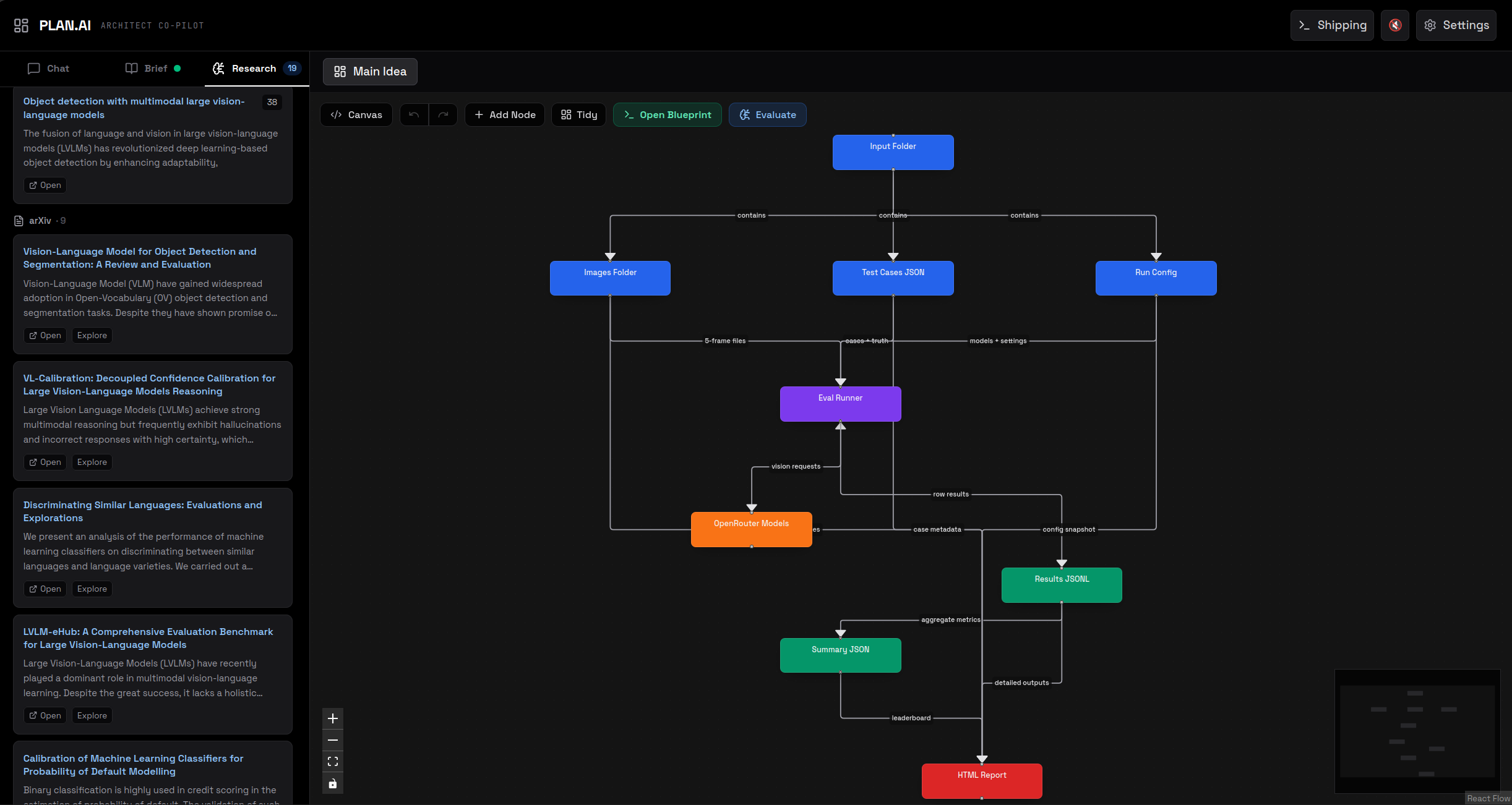
The Architect's co-pilot. Researches across papers, repos, threads, and the web; outputs cited 22-section technical blueprints with Mermaid C4 diagrams.


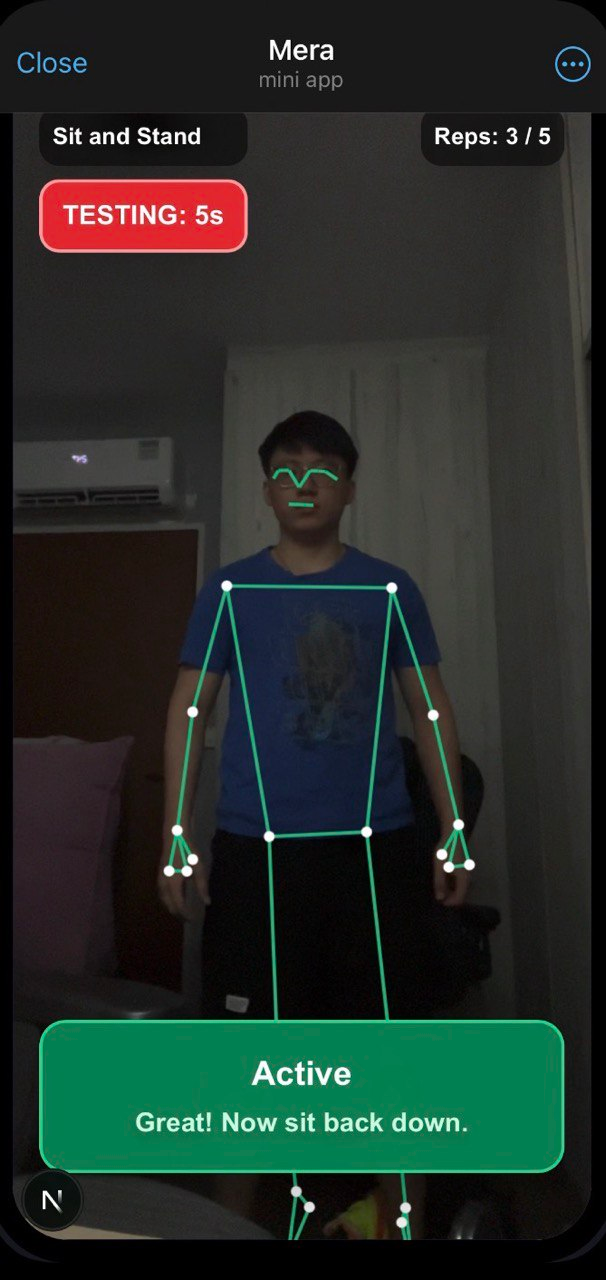
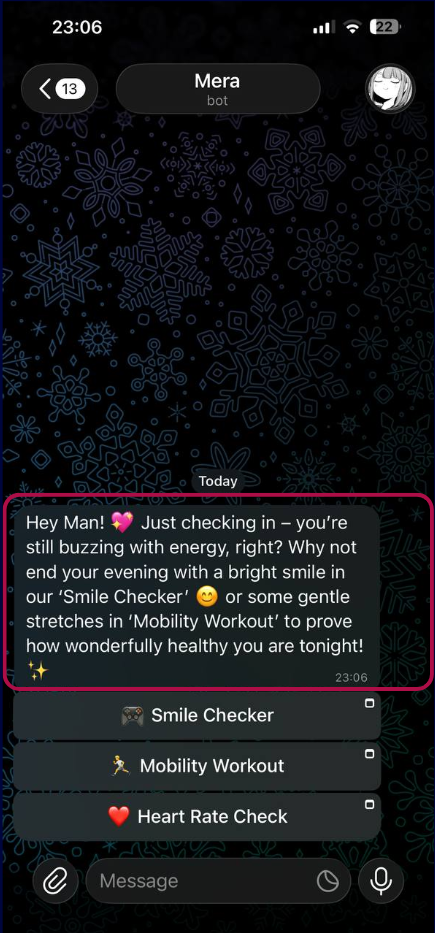
Local-first health companion utilizing a 478-point facial mesh and rPPG for edge-computed vital sign monitoring.
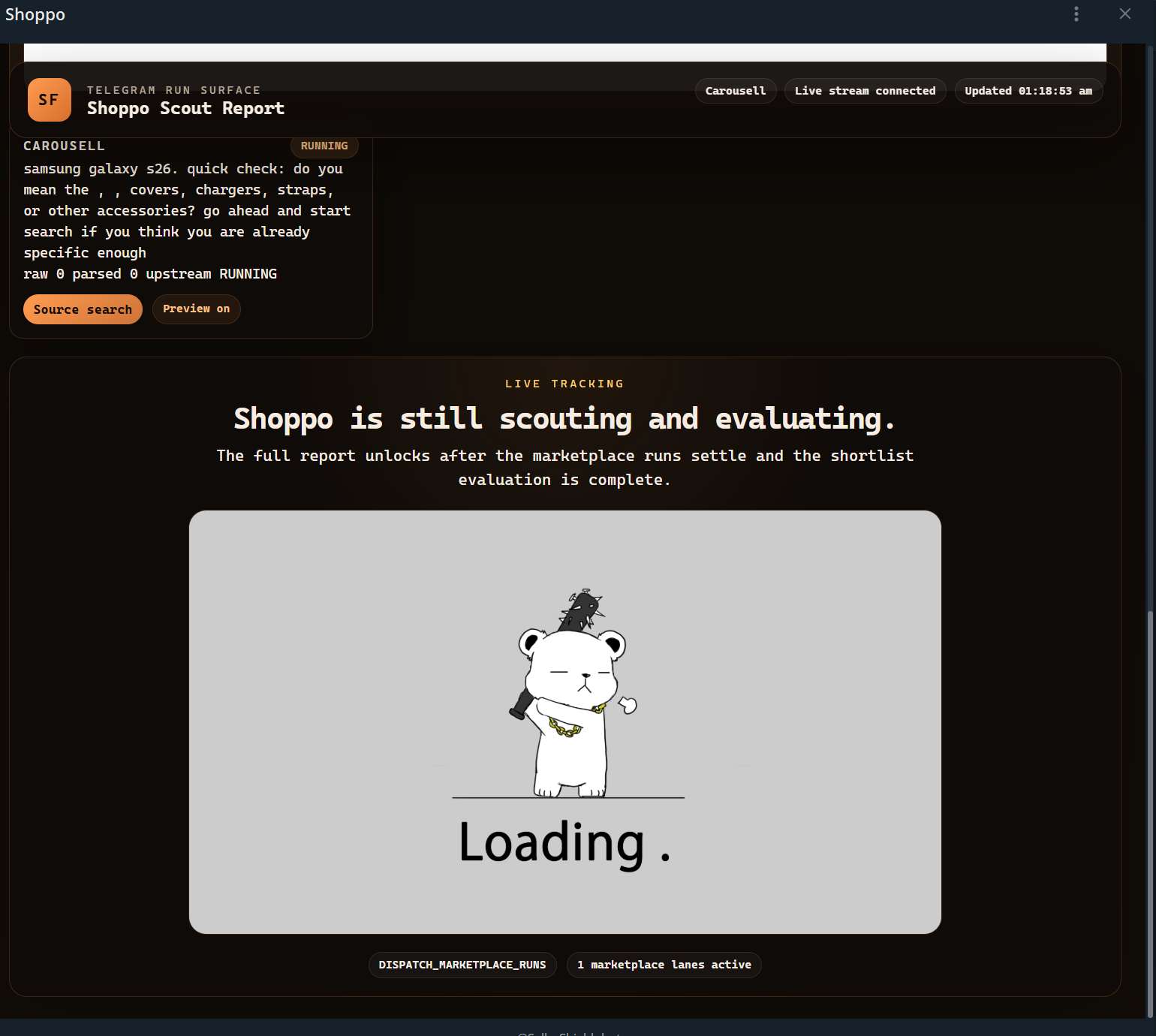
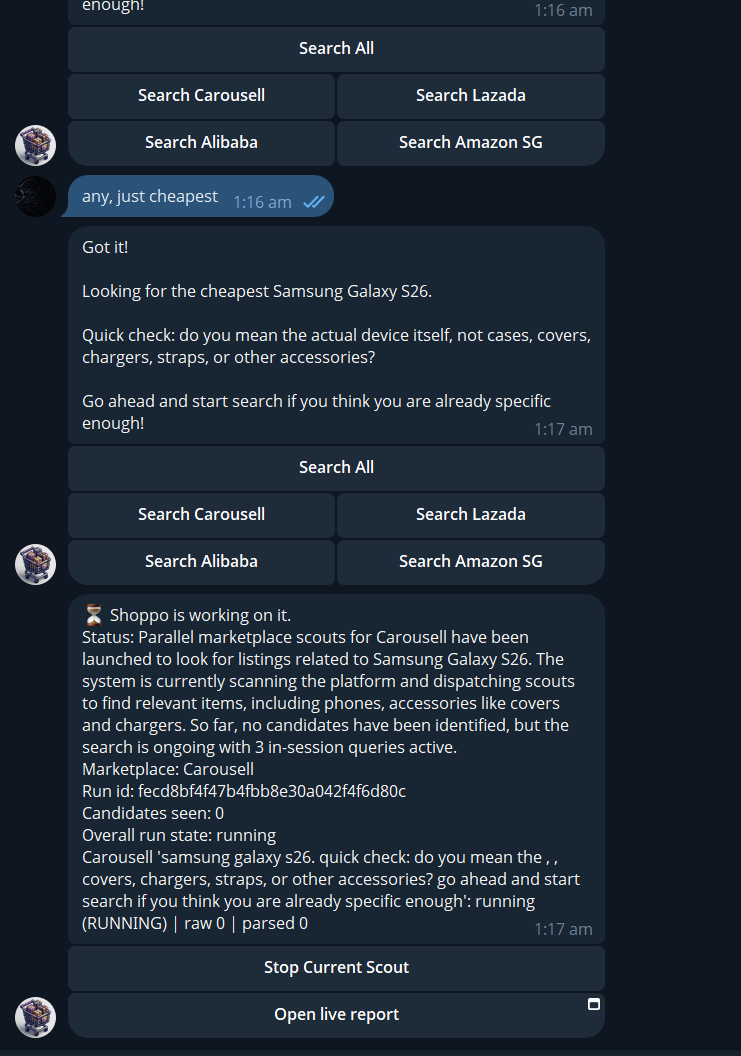
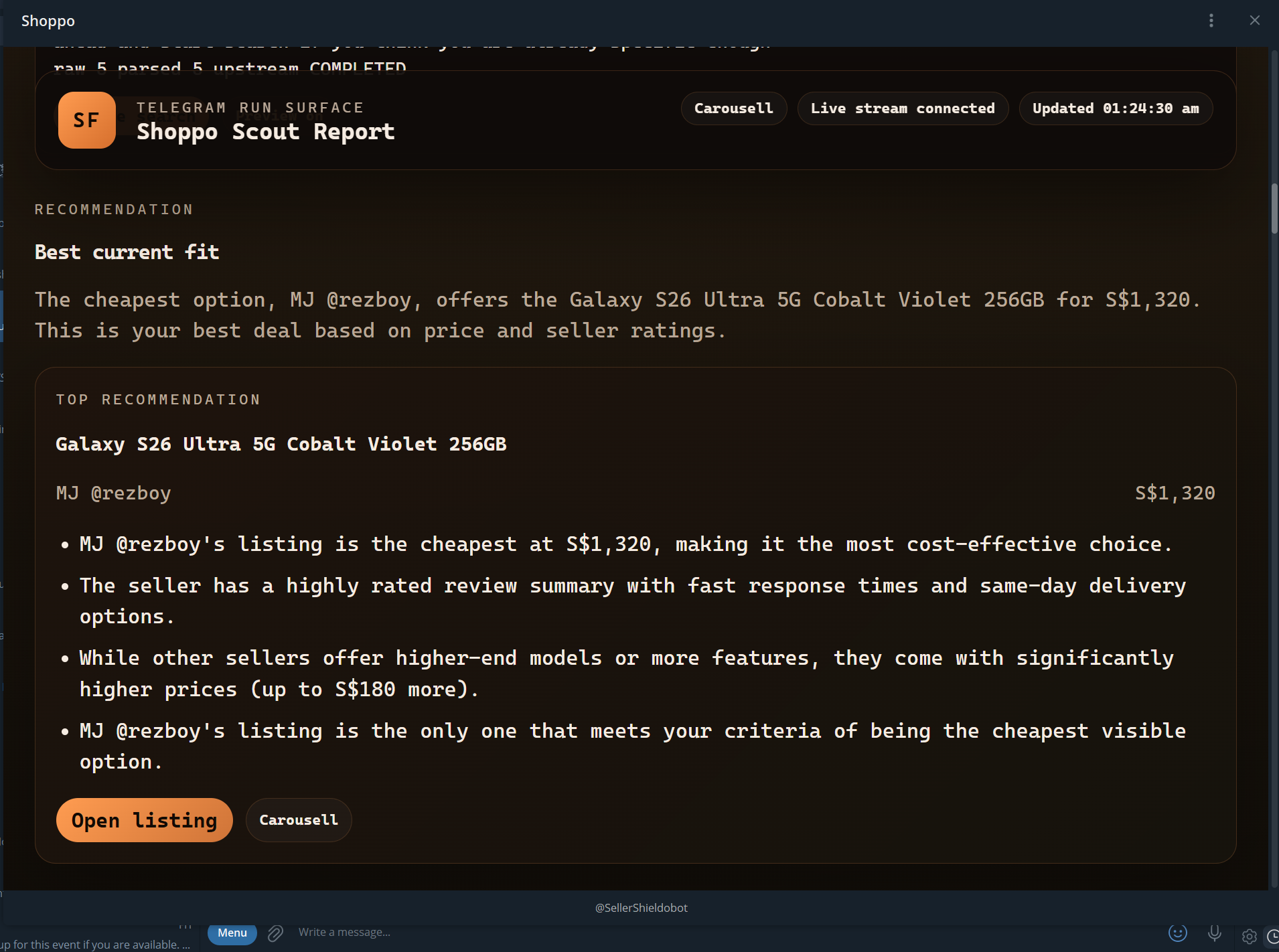
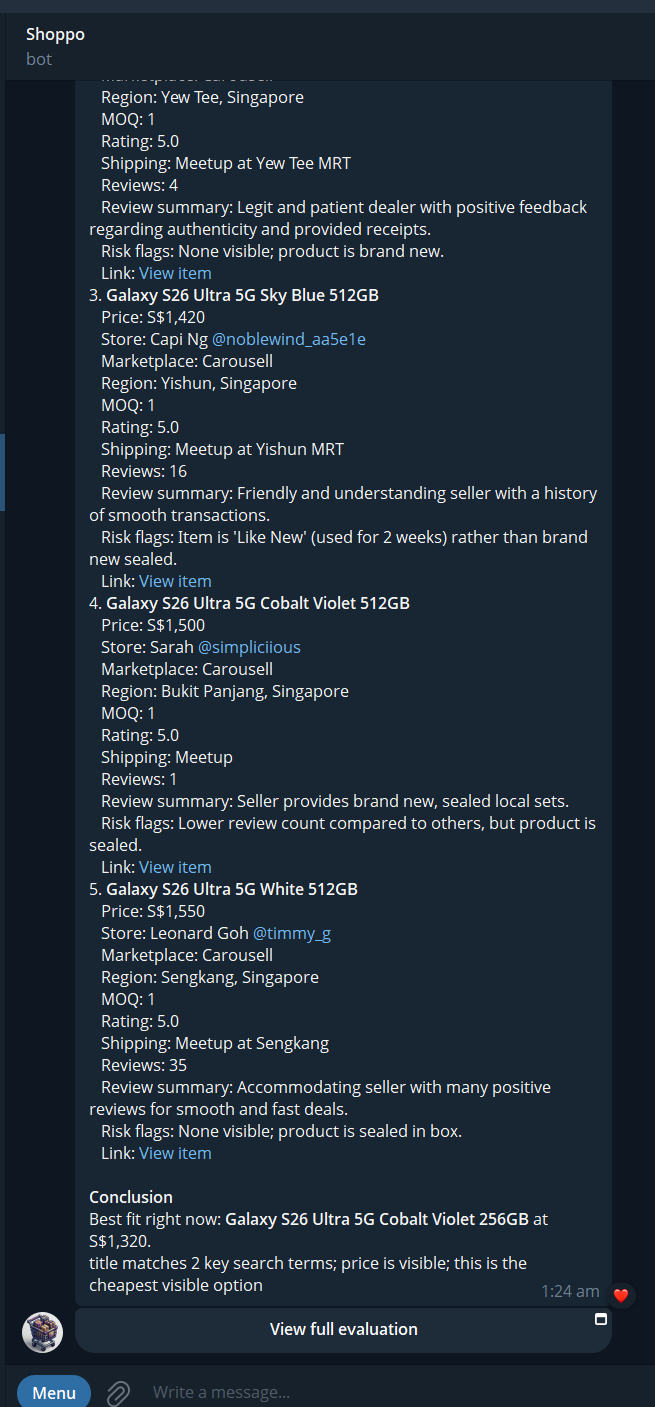
Telegram-native shopping agent that turns messy user intent into TinyFish marketplace fan-out, evidence-backed ranking, and a clearer shortlist.
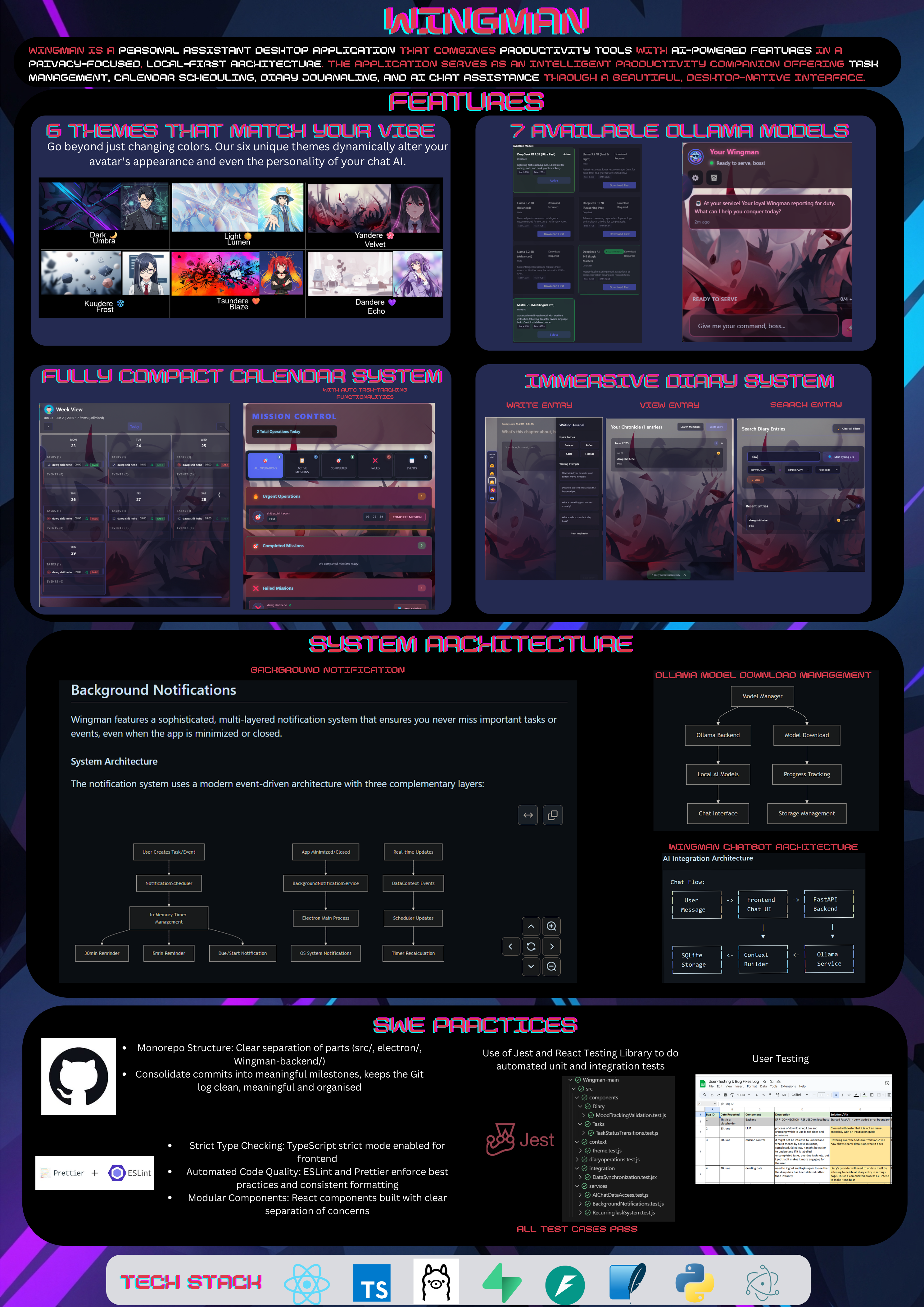
Privacy-focused desktop assistant with offline Ollama IPC orchestration and built-in task management.


Building software for the Matrix-4 autonomous delivery robot across ROS 2 Jazzy, MQTT, Nav2, Jetson Orin AGX vision, and CAN bus control. I am integrating SAM3 open-vocabulary detection, containerising robot services, and working inside the Jenkins / Spinnaker / AWS Kubernetes deployment pipeline and Kriya WebRTC remote-intervention stack.
Guiding Year 2 students through Object-Oriented Programming and software engineering principles. I manage weekly tutorials, help teams navigate collaborative development environments, and debug complex Java codebases to ensure solid architectural practices.

I'm actively seeking opportunities in embedded systems, AI integrations, and full-stack development. If you're working on interesting technical challenges, let's connect.